xb023

xb023
Technische Daten
Eckdaten
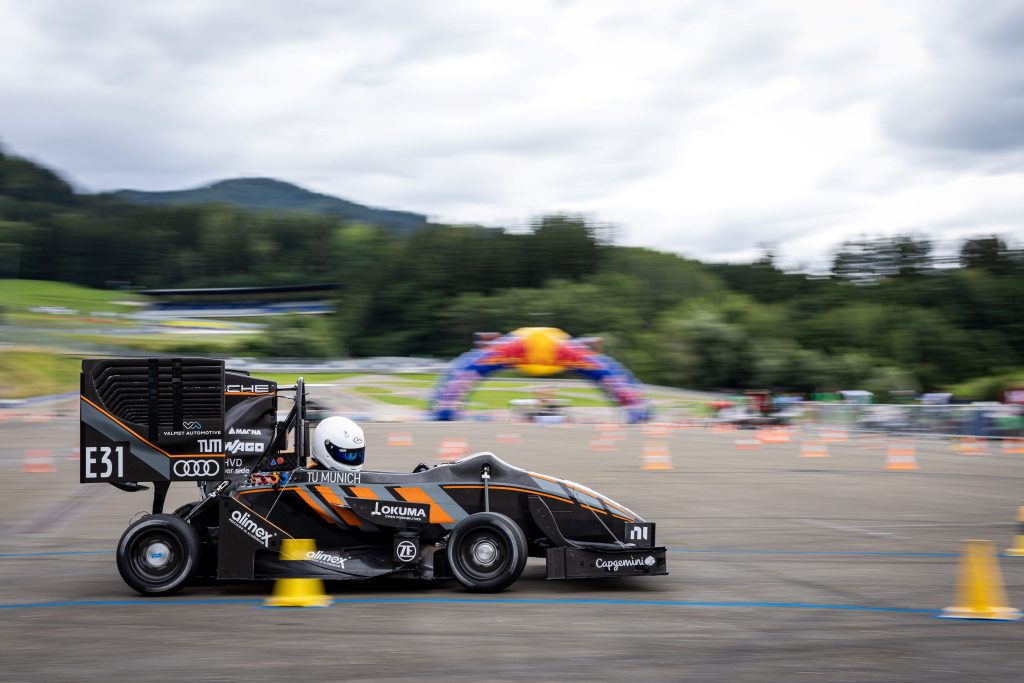
Der xb023 ist unser drittes Fahrzeug mit einer kombinierten elektrischen und fahrerlosen Plattform. Aufgrund der neuen Regeln für die Frontaufprallstruktur wurde die für TUfast typische hohe Nase des Fahrzeugs, die bei allen bisherigen xb-Fahrzeugen vorhanden war, durch eine der niedrigsten ersetzt, die wir je hatten. Trotz der umfangreichen Änderungen am Design schaffte es der xb023 bei FSA auf den zweiten Platz in der Gesamtwertung und erreichte den Sieg beim fahrerlosen FSG Acceleration Event.
E-Antriebstrang
(4x35kW)
- 4x Fischer Elektromotoren: 35 kW und 29,1 Nm maximal.
- Akkukapazität: 6,2 kWh
- Vollständig selbst entwickeltes elektrisches System:
SiC-Umrichter, zentrale Steuereinheit, Batteriemanagementsystem und Armaturenbrett - Dualband-Langstrecken- und LTE-Telemetriesystem

Chassis & Aerodynamik
Chassis & Ergonomie
- Ganzkörper-CFRP-Monocoque mitmit Eineroptimiertem Layup mit einem hohen Verhältnis von Steifigkeit zu Gewicht
- Ergonomisch optimierte Sitzposition und verstellbare Pedalbox selbst entworfener CFK-Sitz mit individueller Schulterstütze
Aerodynamik
- CLA = 6.65 and CdA=1.98 bei Geradeausfahrt
- CFD-optimierte Aerodynamik
- 3D geschwungene Heckflügel-Endplatten
- Passive Kühlung mit Lufteinlass über dem Fahrer
Powerground
- 2 Impeller, die die Luft vor dem Unterboden beschleunigen
- 5kW kombinierte Leistung
- selbstentwickelter 48V LV Akku mit zugehörigem BMS

Fahrwerk & Fahrdynamik
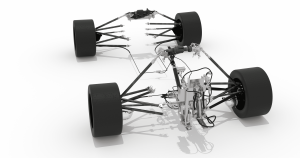
- Hochintegriertes Roll-Heave-System
- Exzentrischer Motor mit hochgezogenen Querlenkern an der Vorderachse, Planetengetriebe an der Hinterachse
- 4-Rad-Antrieb mit hochintegrierten Radnabenpaketen
- Funktionsintegrierte, topologisch optimierte lasergesinterte Achsschenkel und Umlenkhebel Vorderachse
- Hoosier lco 16x10x7.5 Reifen
- Einteilige CFK-Felgen
- Steuerung der Fahrzeugdynamik:
Schlupfregelung, Torque Vectoring - Selbstentwickelte Simulationen und Tools (Rundenzeit, Mehrkörper, HiL, SiL, MiL, YMD, ...)
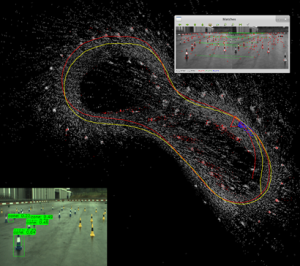
Autonomes System
- Umfassendere Tests durch kontinuierliche Integration und mehrere Simulationspipelines
- Ouster OS1 Lidar 64 Schicht
- fastSLAM Lokalisierung
- EKF-Zustandsschätzung
- Lokale und globale Bewegungsplanung
- Raceline Optimierung auf minimale Krümmung
- Krümmung-basierte Querregelung
Season Recap xb023


Wettbewerbe
Formula Student Germany 2023
1. Place Driverless Acceleration
4. Place Acceleration
Formula Student Austria 2023
2. Platz in der Gesamtwertung
4. Platz im Engineering Design
4. Place Acceleration
2. Place Efficiency
Formula Student Netherlands 2023
4. Platz im Engineering Design
4. Platz Autocross
Formula Student East 2023
4. Place Driverless Skid Pad