xb023

Key Data
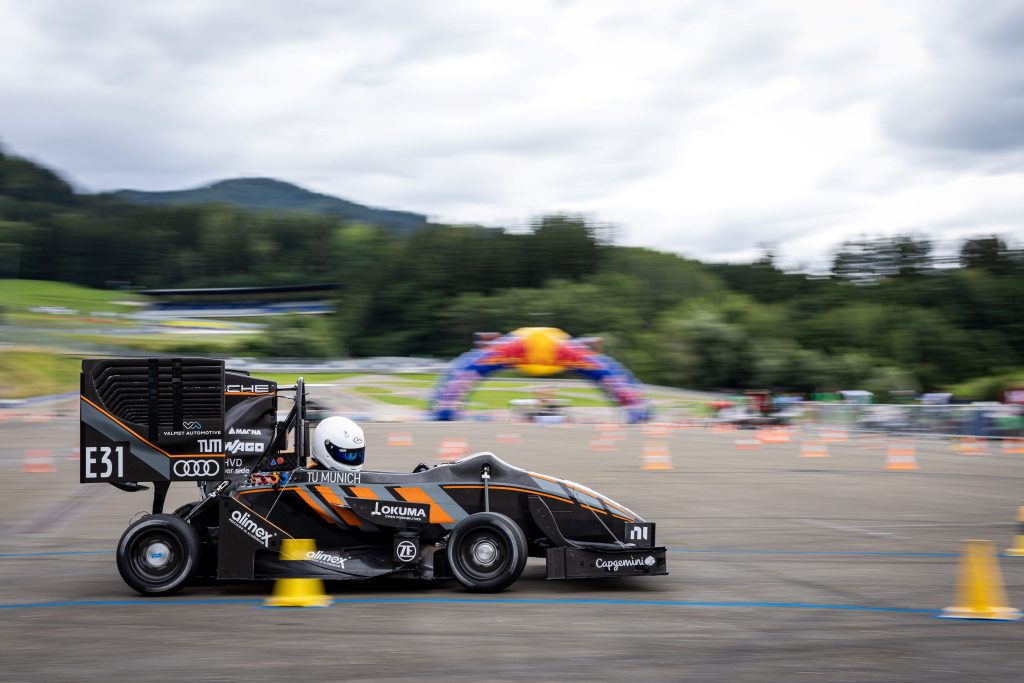
The xb023 is our third car with a combined electric and driverless platform. With the new regulations concerning the front impact structures, the typical TUfast high nose of the car that has appeared one every previos xb car, has been changed to one of the lowest ones we have ever had. Despite major changes to the deisgn, the 2023 contender managed to grab 2nd place overall at FSA as well claim a victory at driverless FSG Acceleration event.
E-Powertrain & Electronics
(4x35kW)
- 4x Fischer electric motors: 35 kw and 29.1 Nm max.
- Accumulator capacity: 6.2 kWh
- Fully self-developed electric system:
SiC inverter, Contol unit, battery management system, dashboard - Dual band long range and LTE telemetry system

Chassis & Aerodynamics
Chassis & Ergonomics
- Full-body CFRP monocoque with an optimized layup with a high stiffness-to-weight ratio
- Ergonomically optimized seating position, adjustable pedal-box, self designed CFRP seat with customized shoulder support
Aerodynamics
- CLA = 6.65 and CdA=1.98 on straight line
- CFD optimized Aerodynamics
- 3D curved rearwing endplates
- Passive cooling concept with air inlet above drivers head
Powerground
- 2 Impeller to speed up air at undertray inlet
- 5kW combined power
- self developed 48V LV battery with BMS

Suspension & Vehicle dynamics
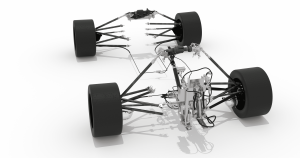
- Highly integrated roll-heave-system
- excentic motor with raised wishbones on front axle, cenctric planetary gearbox on the rear axle
- 4-wheel drive with highly integrated wheelhub packages
- Function integrated, topologically optimized laser sintered uprights and bellcranks front axle
- Hoosier lco 16x10x7.5 tyres
- One-piece CFRP rims
- Vehicle Dynamics Control:
Slip control, Torque vectoring - Self-developed simulations and tools (lap time, multi-body, HiL, SiL, MiL, YMD, …)
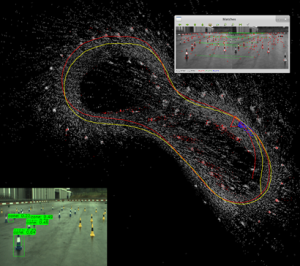
Autonomous System
- More extensive testing through the use of continuous integration and multiple Simulation Pipelines
- Ouster OS1 Lidar 64 Layer
- fastSLAM localisation
- EKF state estimation
- Local and global motion-planning
- Raceline optimization with minimal curvature
- Curvature based steering control
Season Recap xb023


Competitions
Formula Student Germany 2023
1. Place Driverless Acceleration
4. Place Acceleration
Formula Student Austria 2023
2. Place Overall
4. Place Engineering Design
4. Place Acceleration
2. Place Efficiency
Formula Student Netherlands 2023
4. Place Engineering Design
4. Place Autocross
Formula Student East 2023
4. Place Driverless Skid Pad